








Heterogeneous vectors can be slow. Janky Ferenc introduces a sequential container for storing polymorphic objects in C++.
In the Object-Oriented Programming paradigm, dealing with collections of polymorphic types is a recurring programming pattern. Heterogeneous collections storage cannot always guarantee co-locating objects, resulting in access penalties on modern CPU hardware where memory caching is utilized. This paper describes a container that has (on average) better access performance when storing polymorphic objects than other C++ Standard Template Library (STL) based variants. It achieves this by structurally enforcing the locality of references and by reducing the number of the total allocation count when a unique ownership model is desired.
Introduction and motivation
One of the most recurring patterns with the object-oriented software (OOP) design paradigm is ownership and management of ownership. In order to exploit the benefits of the design principles, the use of interface, and implementation classes are required. In the C++ language, dynamic dispatch is only applicable when a particular virtual function is called through a pointer or reference to an interface class. When pointers are involved in C++, the most frequently arising question is ownership: who owns the object, i.e., which part of the code will free up resources associated with an object?
There are multiple working solutions for this problem: smart pointers for expressing unique (std::unique_ptr<T>) and shared ownership (std::shared_ptr<T>) or the gsl::owner<T> from GSL libraries for marking pointers as owners of the resource while treating all others as non-owners. While the former is an active way of having a handle object through which to access the desired object and also of invoking the destructor and freeing up the allocated memory on the handle object’s destruction, the latter is more like an annotation. Static analyzers can flag potential leaks and undefined behaviours related to resource management based on these annotations.
If the objective is to have a collection of polymorphic objects whose lifetime is associated with the containing data structure, the standard solution is to use one of the standard containers parameterized with a smart pointer of the interface type, e.g: std::vector<std::unique_ptr <MyInterface>>. That solution fulfils the requirements of resource management. However, if modern CPU architecture is considered – where locality of references is the key driver of performance – it might be sub-optimal as, typically, the memory layout will look as illustrated in Figure 1.
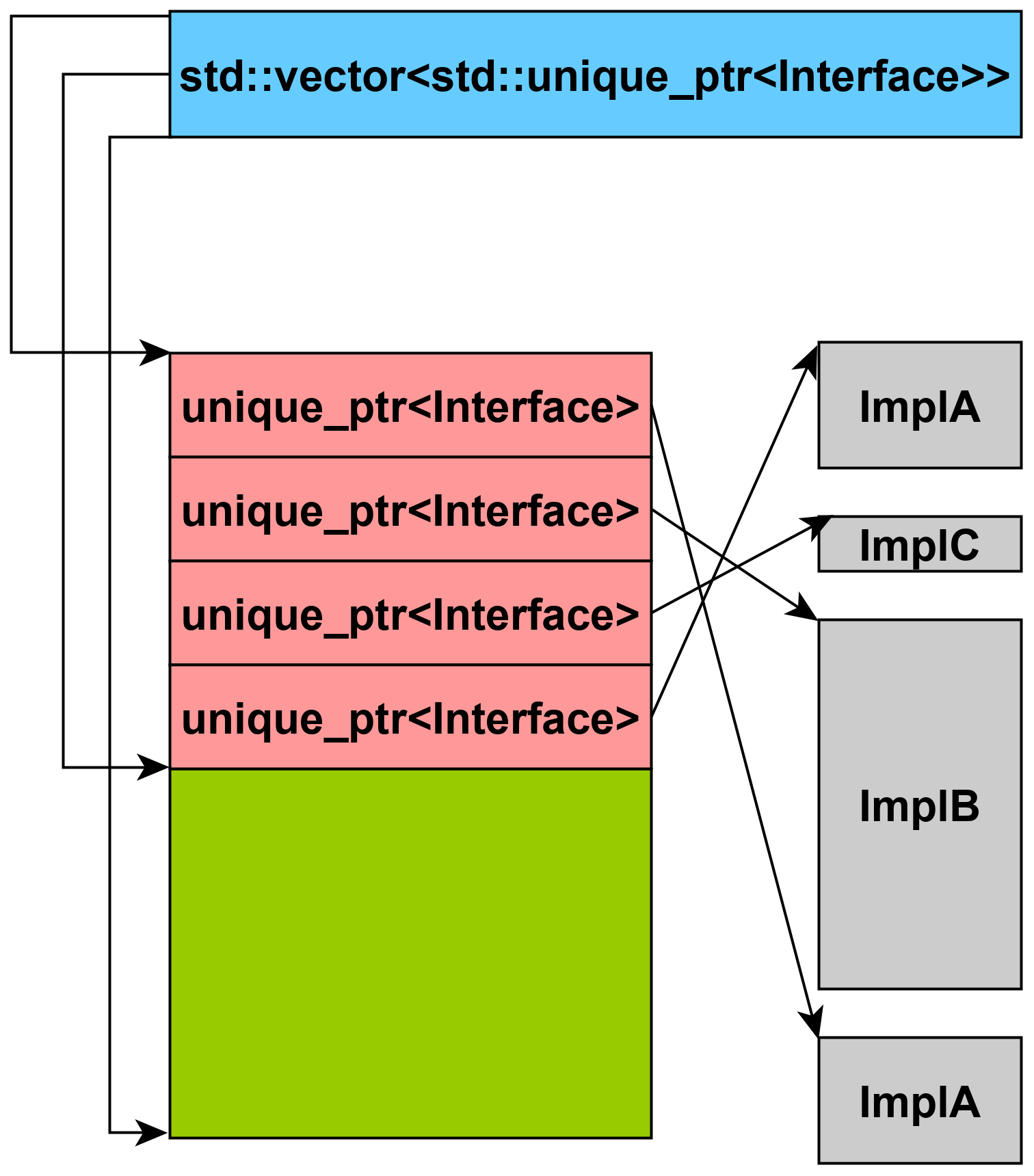 |
| Figure 1 |
On most modern CPU architecture that uses out-of-order execution, overall performance is mostly affected by how the CPU cache is utilized. Assuming that it is more important to ensure the locality of references than optimizing asymptotic complexity – if the problem size is below a certain threshold where the former limit dominates performance – that locality must somehow be enforced structurally to squeeze out maximum performance from both software and hardware [Maness18]. In managed languages, there is no direct control available for the application programmer to manually control allocation layout; however, with such a system programming language as C++, this can be addressed as well – pun intended.
Nevertheless, such a data structure does not exist in the C++ Standard Library. While the Standard Template Library (STL) is generic enough for locality to be improved by using custom allocators, and C++17’s recent addition of std::pmr::monotonic_buffer_resource makes it easier than ever. The monotonic resource’s only problem is that if the assigned memory resource is exhausted, it will fall back to the upstream allocator, and the locality is not guaranteed once again. Moreover, if we examine the total allocation count when using e.g: std::pmr::vector<unique_ptr<Interface>>, it will be still higher than expected (including the object allocation as well).
The purpose of this article is to introduce a container that is specifically tailored for the use-case described earlier, structurally providing locality of references and keeping the total allocation count (when the data structure requests a new chunk of memory) at a minimum without the need for custom allocators. Furthermore, this container must not be comparably worse than the standard alternative in the best-case scenario while also being significantly better in the worst-case scenario. The best-case scenario means that most allocations happen successively, and in contrast, the worst-case means when random allocations happen with random longevity. Given this data structure, the memory layout would be guaranteed to look something like that illustrated by Figure 2. The implementation and the benchmarks can be obtained from [Janky18].
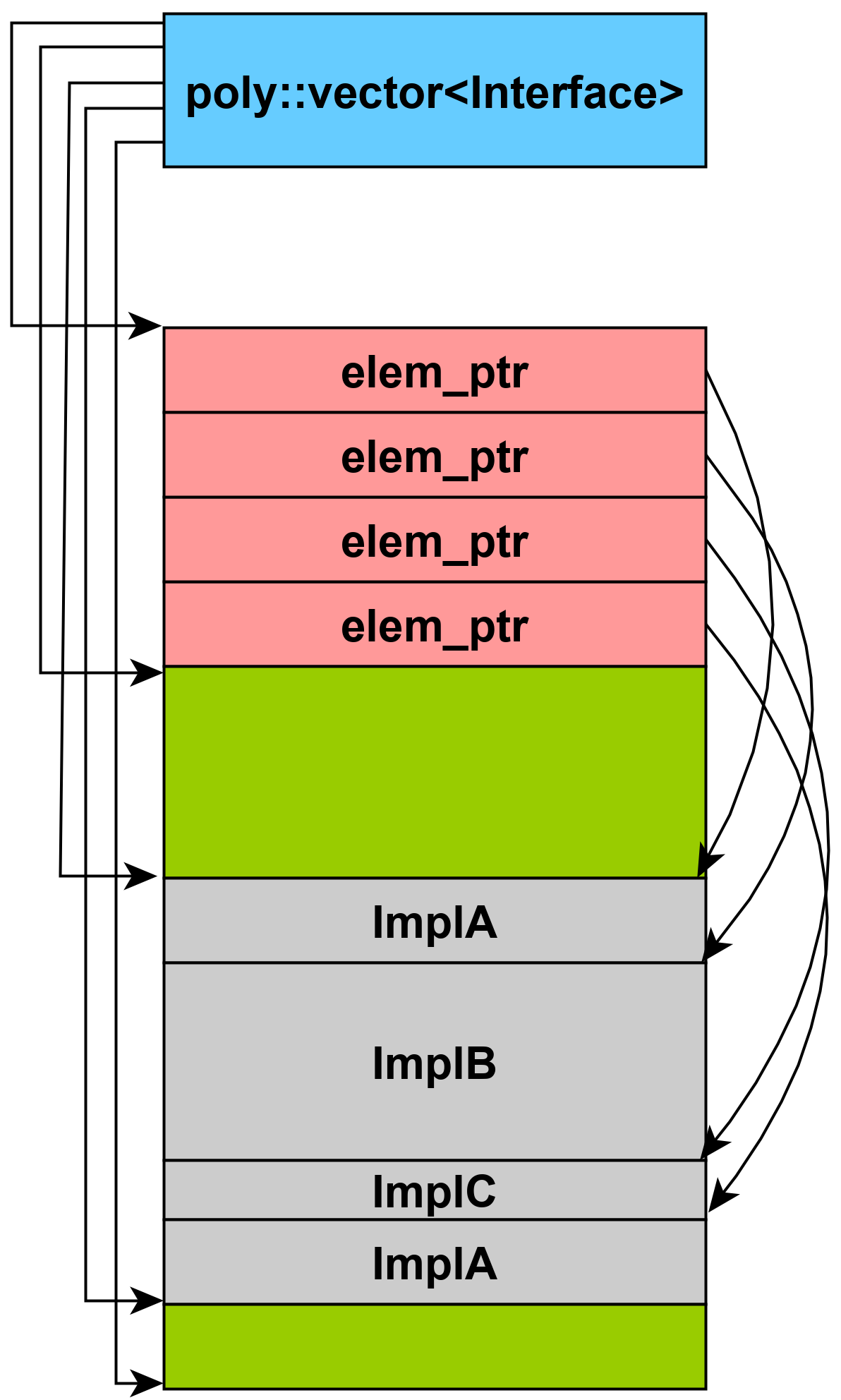 |
| Figure 2 |
Design
While STL already presents a solution for dynamic memory management abstraction in the form of Allocators – an application of policy-based class design [Alexandrescu11] – the key for managing/storing objects in this fashion is cloning/moving. To address the other problem of relocating objects through their interface reference, another concept has to be introduced in the form of a Cloning Policy. This can be described as a concept, as seen in Listing 1.
namespace poly
{
template <typename T>
struct type_tag
{
using type = T;
};
} // namespace poly
using namespace poly ;
using namespace std;
template <typename InterfaceT, typename Allocator>
constexpr auto AllocatorPointerMatch =
is_same_v < InterfaceT ,
typename pointer_traits<
typename allocator_traits < Allocator >::
pointer >:: element_type >;
template <typename T, typename InterfaceT,
typename Allocator >
concept HasClone = requires (T cp , Allocator a)
{
{
cp. clone (a,
declval < typename allocator_traits
< Allocator >::pointer >(),
declval < typename allocator_traits
< Allocator >::void_pointer >() )
} -> same_as < typename allocator_traits
< Allocator >:: pointer >;
};
template <typename T, typename InterfaceT,
typename Allocator >
concept HasMove =
is_nothrow_move_constructible_v <T> &&
is_nothrow_move_assignable_v <T> &&
requires (T cp , Allocator a)
{
{
cp. move (a,
declval < typename allocator_traits
< Allocator >::pointer >(),
declval < typename allocator_traits
< Allocator >::void_pointer >() )
} -> same_as < typename allocator_traits
< Allocator >:: pointer >;
};
template <typename T, typename I, typename A,
typename Derived >
concept CloningPolicy =
AllocatorPointerMatch <I, A> &&
is_nothrow_constructible_v <T> &&
is_nothrow_copy_constructible_v <T> &&
is_nothrow_copy_assignable_v <T> &&
copyable <T> &&
( constructible_from <T, type_tag < Derived >>
|| default_initializable <T >) &&
( HasClone <T, I, A> || HasMove <T, I, A >);
|
| Listing 1 |
The cloning policy must be able to clone – move if supported – objects around in memory through a base class pointer. The new additions to the typical class hierarchy can be identified by the small white star (ê) in Figure 3. The other component is the element pointer, which can be thought of as a decentralized smart pointer as the smart pointer operation is really realized by two collaborating classes: the vector and the element pointer itself, with the vector managing the lifetime while the access is provided through the element pointer.
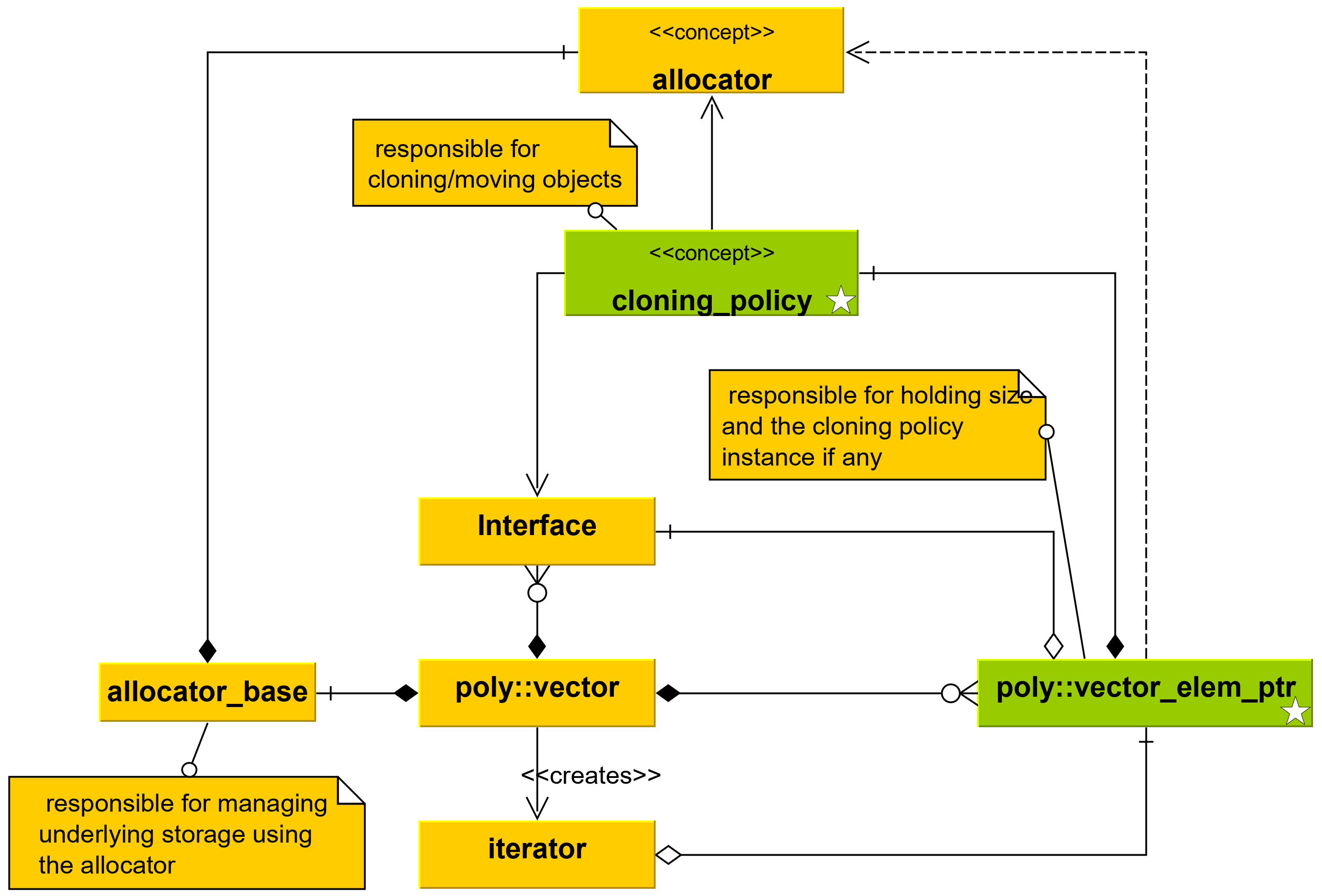 |
| Figure 3 |
Two archetypes of cloning policies have been designed: delegate_cloning_policy and no_cloning_policy. The former is suitable for the most common use cases where the derived classes are regular in terms of copy/move. As one might assume, this cloning policy captures the method of cloning/moving at the time of insertion to the container. That also means the static type of the object inserted must be known at compile time, at the point of insertion. The latter does not allow any copy/move of an object, i.e., if the container capacity is exhausted, then a std::bad_alloc exception is raised.
Since cloning_policy is a concept – as denoted in Figure 3 – the user can supply a type that suits the actual class hierarchy whose instances are stored in the container. For example, if there is already a Clone virtual member function declared in the interface, a policy class can be written quickly to use that function when the container must copy the objects to a new location, e.g., because of a resize.
The classic size and capacity concept has to be augmented in this container: here, an average size is considered as size, which is the total amount of memory occupied by the objects stored in the container divided by the number of objects. The container’s exponential growth is also calculated based on the average size (including the to-be inserted element in the average).
Besides these, the aim was to provide the same level of exception safety and API as one would expect from the implementation based on std::vector<std::unique_ptr<Interface>>.
Evaluation and measurements
Time-based measurements are not trivial to carry out during software-benchmarking and when using a non-realtime OS. For these scenarios, the measurement metric is the overall execution wall clock time. This is provided by the OS through a high resolution clock – for specific operations over a given object count that is processed through the containers [Reich18]. For the evaluation, a demo Interface class has been defined with two distinct and different sized implementation classes. The vectors under test were populated randomly from these two types. To minimize the variance of the measurements, the concept of static thread affinity (a.k.a thread pinning) was used hand-in-hand with setting the highest priority (smallest nice value) for the benchmark process. This way, the process will not be scheduled away that much, and most of the cache trashing occurs because of the benchmark program itself and not as a result of the rescheduling.
The evaluation of the container was based on three sets of measurement scenarios that have been defined as the following:
- total number of allocation count: how many times did the program allocate memory from the runtime environment – the smaller the value, the better;
- best-case scenario (when the objects are populated into the vector in a successive manner without any in-between allocations from other places): benchmark the sequential access time – the smaller the value, the better;
- worst-case scenario (where the vector is populated with objects while allocations are happening from other places, resulting in each and every object being on a separate page): benchmark the sequential access time – a smaller value is better (NB: this is simply emulated by allocating a page for an object and constructing it there).
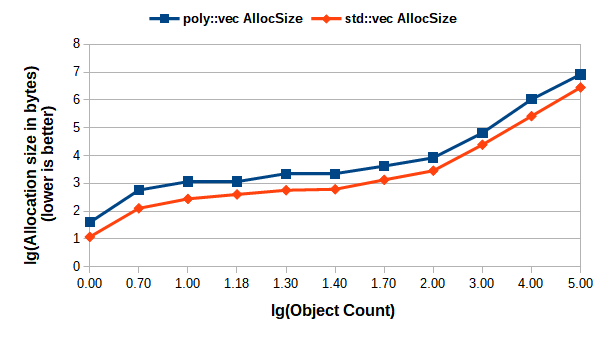
Figure 4 shows the total allocation count, while Figure 5 the allocated size of memory, including the allocations made as a result of storing the object on a heap managed by a smart pointer handle. The data has been plotted using a log-log scale for better clarity. Figure 4 and Figure 5 should be interpreted together, e.g., for 1000 objects (at coordinate 3 on the horizontal axis) of randomly chosen types from the demo class hierarchy, there were a total of 11 calls to the allocator’s allocate member function with the total size of 66006 bytes, while for the std::vec alternative the total allocation calls were 1018 with the total size of 24812 bytes – on average. As one can see, the total allocation count is smaller for poly::vector, which is a consequence of the omitted heap allocation when the objects are instantiated, while the total size is slightly greater for poly::vector. This is because that poly::vector is growing its capacity exponentially – based on the average size that is a weighted average of all stored objects’ size. This trade-off for ensuring the locality incurs somewhat higher memory utilization. However, the benefit of a reduced allocation count is obvious. Furthermore, it is even more significant when allocators from the pmr namespace are used, as the allocate call there will not be inlined normally. There is no devirtualization, as it is a dynamically dispatched call. This adds more penalty if there are more allocations made than necessary.
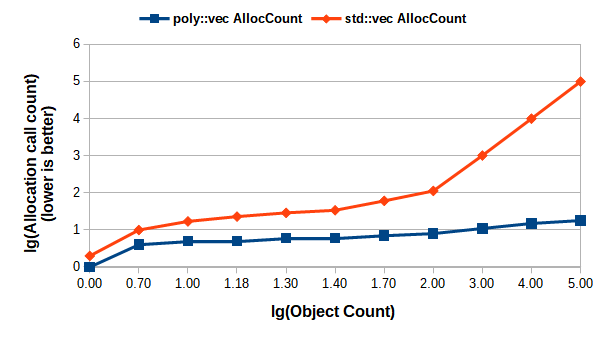 |
| Figure 4 |
 |
| Figure 5 |
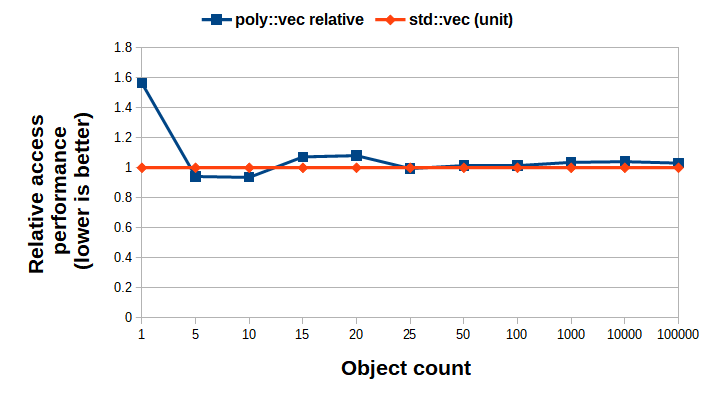
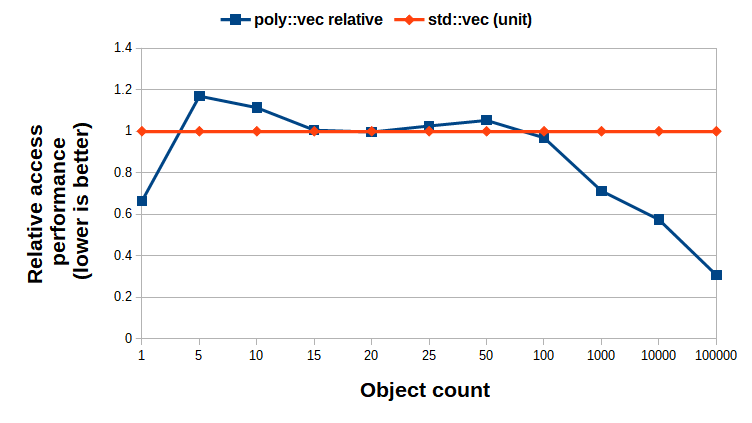
The measurement data that was used to generate Figure 6 and Figure 7 is based on average values. Multiple measurements were carried out for the same object count, and the statistical difference was determined by using two-tail Student T-test with unequal variances, α = 0:01. For Figure 6 – which shows the averages for the best-case scenario based on the raw data at the key points – there is no statistical significance of the differences between the averages. Therefore we can say that, most probably, poly::vector is not worse than the std::vector based alternative in this aspect. In the worst-case scenario – illustrated by Figure 7 – the raw data showed that until the object count reaches 100, the difference is statistically insignificant, and also showed that for a greater object count, poly::vector outperforms the STL-based alternative in terms of sequential access performance. (NB.: For the small object count measurements, the variance was so significant and also the timings were inaccurate that no real consequence can be deduced from those data points.)
 |
| Figure 6 |
 |
| Figure 7 |
Another important aspect – yet less tangible in terms of performance – is the syntactic verbosity of poly::vector compared to std::vector. Even though it has no runtime impact, it is still much more convenient to express ideas directly in code. As an example: if the programmer wishes to place an object of polymorphic type into a container, currently a smart pointer has to be created, memory to be allocated, the object to be constructed and assigned to the smart pointer handle instance for memory and lifetime management, then inserted into the container itself. With poly::vector, this is not the case: the intention is expressed directly. This argument is analogous to the for loop versus STL range-based algorithms. While each has its place, the intention and the business logic are still more clearly communicated using the latter.
Conclusion
In this paper, a generic container has been described that is tailored for storing polymorphic instances derived from a well-known interface. Due to the underlying memory and layout management, locality of references is enforced structurally, which results in increased sequential access performance with greater object counts, while also reducing the total number of allocation count which could also be beneficial from performance perspective. The trade-off for achieving this is an increased memory utilization, as the container maintains capacity not just for the objects handles but also for the yet to be stored objects based on an average size computation. It has also been shown that with the best-case allocation scheme the access performance is comparable to the standard based alternative.
In summary this container can be used as a drop in replacement for std::vector<std::unique_ptr<InterfaceType>> pattern in high performance applications that use OOP for abstraction but still want to eliminate the penalties due to memory fragmentation.
References
[Alexandrescu11] Andrei Alexandrescu. Modern C++ design: generic programming and design patterns applied, Chapter 1. Addison-Wesley, 2011.
[Janky18] Ferenc Nandor Janky. poly::vector github repository. https://github.com/fecjanky/poly_vector, 2018. Accessed: 2020-09-18.
[Maness18] Wesley Maness and Richard Reich (2018) ‘Cache-line aware data structures’ in Overload 146, available at: https://accu.org/journals/overload/26/146/maness_2535/
[Reich18] Richard Reich and Wesley Maness (2018) ‘Measuring throughput and the impact of cache-line awareness’ in Overload 148, available at: https://accu.org/journals/overload/26/148/reich_2585/
Ferenc received an MSc in Electrical Engineering from BME, Budapest, in 2013. He has since worked for various telecommunication companies, and is currently working as a C++ software developer for an international corporate bank. His main areas of interest are C++ programming, network protocols, FPGA programming and software development. Ferenc is a member of the SmartComLab at BME TMIT.
